|
|||||||||||||||||||||||
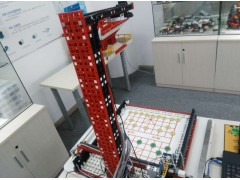
智能象棋機器人是山東卡特智能機器人有限公司推出的人機對戰的娛樂機器人。智能象棋機器人以ARM11為控制核心,由棋盤及棋子、機械手臂(硬件)、博弈分析系統(ARM11控制系統)、機械臂控制系統(單片機控制系統)等部分組成。機器人通過攝像頭實時捕捉棋子的位置變動,得到對手的出招,然后輸入到象棋算法中得到應招,之后通過單片機控制數字舵機來完成棋子的定位和吸放動作,從而實現了真正意義上的人機對弈。
工作原理;
1,利用豐富的結構件摸拼搭。
2,使用高集成,高級智能利用更友好的交互界面的GC300控制器控制編程。
3,使用高性能編碼器電機、高清攝像頭視頻采集技術實現人機對弈象棋。
智能象棋機器人的機械手臂用4個數字舵機控制,其中3個舵機構成機械手臂的關節,可以自由旋轉來完成棋盤的定位,另外一個舵機配合電磁吸盤可完成棋子的吸放動作。棋子內置了磁鐵,以便電磁吸盤挪動棋子。機器人使用的棋盤及棋子的形狀同日常娛樂比賽用棋盤及棋子完全一樣,但為提高棋子的識別率,在棋子表面粘貼了彩色的圖片,紅綠色用來區分雙方棋子,棋子周邊顏色各異的圓圈用來區分同一方的不同棋子。這樣就免去了對漢字的識別。開局前,機器人會發出語音提示,提示對方博弈開始;對弈過程中,機器人利用它的“眼睛”——攝像頭對整個棋盤實行監控,若對方走子不符合象棋規則將發出語音提示,若符合則通過一定的象棋對弈算法計算出應招,控制機器人的機器手臂完成取棋、下棋的完整動作,實現真正意義上的人機對弈。整個對弈過程中對弈人可完全同平常下棋一樣移動棋子,并在短時間內領略中國象棋的博大精深及與機器人對弈的樂趣。
 您還沒有登錄,請登錄后查看詳情
您還沒有登錄,請登錄后查看詳情 發布供求信息 發布供求信息 |
 推廣企業產品 推廣企業產品 |
 建立企業商鋪 建立企業商鋪 |
 在線洽談生意 在線洽談生意 |