|
|||||||||||||||||||||||
擦玻璃機器人的工作原理主要是憑自身底部的真空泵或者風機裝置,牢牢地吸附在玻璃上的。然后它會助一定的人工智能,自動探測窗戶的邊角距離、規劃擦窗路徑(從左至右,或從下至上的擦拭順序),并在清潔完畢之后回到初始的放置位置方便人們將其取下。
清洗速度:2分鐘/平方
清潔模式:三種
尺寸:29 * 14.2 * 11.5厘米
電壓:100 - 240 vac / 50 hz / 60赫茲
檢測窗口框架:汽車
Anti-falling控制:UPS電源
存儲設備/安全繩
吸附模式:真空吸收
控制模式:移動應用/涉及/遠程控制
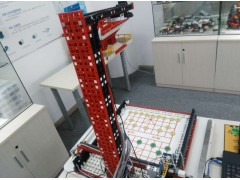
擦玻璃機器人技術特點
①采用吸盤吸附方式,保證了機器人在玻璃幕墻上自由行走并清洗玻璃。
②采用氣缸完成避障系統,使機器人動作更快,并且氣缸對位置要求不高
③采用無線控制使機器人與地面人工操作臺分離
④采用無線攝像頭實時監控,使得在地面上可以實時觀察機器人高空作業的情況
⑤采用非接觸式去污,既無壓力、又不加洗滌劑,體現了簡潔、環保的設計理念。與以往的真空吸附清洗機器人相比,本作品的技術創新性與成本優勢明顯,市場競爭力更強。
 您還沒有登錄,請登錄后查看詳情
您還沒有登錄,請登錄后查看詳情 發布供求信息 發布供求信息 |
 推廣企業產品 推廣企業產品 |
 建立企業商鋪 建立企業商鋪 |
 在線洽談生意 在線洽談生意 |